最高のドライブと
オートメーションのソリューションを
1つのパッケージに
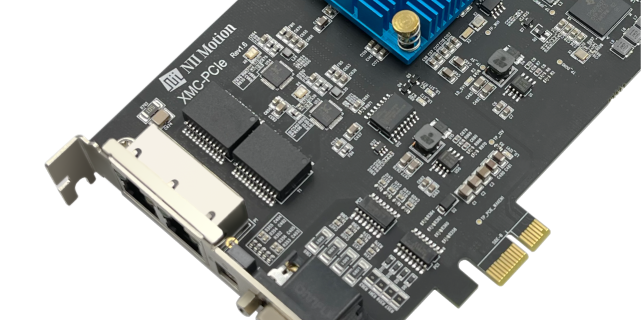
イーサキャット通信タイプ
高性能モーション
コントローラ

スタンドアロン
イーサキャット通信タイプ
高性能モーション
コントローラ
KAS(コルモーゲンオートメーションスイート)
コルモーゲンオートメ-ションスイート™ (KAS)は、高性能マシンの開発に欠かせないソフトウェアとハードウェア環境が含まれます。
お客様の開発時間を短縮し、装置のスループットを向上させ、ムダを省き、システム全体の機器を最大限に利用することができます。
イーサキャット通信タイプ
高性能モーションコントローラ
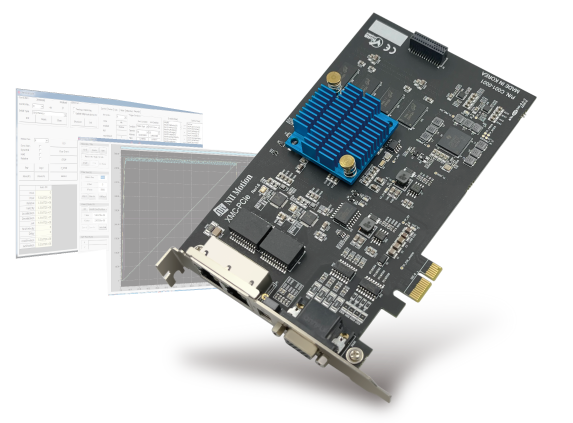
イーサキャット通信タイプ
高性能モーションコントローラ